Learning Continuous Control with Geometric Regularity from Robot Intrinsic Symmetry
Abstract
Geometric regularity, which leverages data symmetry, has been successfully incorporated into deep learning architectures such as CNNs, RNNs, GNNs, and Transformers. While this concept has been widely applied in robotics to address the curse of dimensionality when learning from high-dimensional data, the inherent reflectional and rotational symmetry of robot structures has not been adequately explored. Drawing inspiration from cooperative multi-agent reinforcement learning, we introduce novel network structures for single-agent control learning that explicitly capture these symmetries. Moreover, we investigate the relationship between the geometric prior and the concept of Parameter Sharing in multi-agent reinforcement learning.
MASA — Trifinger (Real)
Baseline — Trifinger (Real)
MASA — Ant on Ball
Baseline — Ant on Ball
Highlights
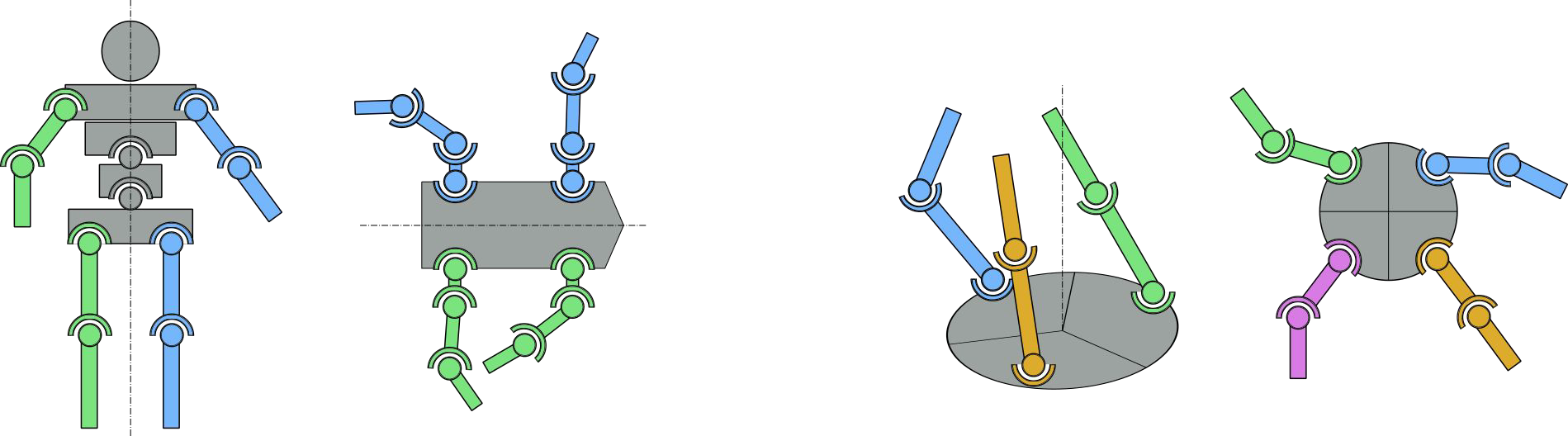
- Observation. Many robots are built symmetric — quadrupeds, humanoids, and multi-finger hands all carry reflectional/rotational symmetry in their structure. Yet standard MLP policies for single-agent control ignore this prior entirely.
- Idea — MASA. We design network structures for single-agent control that explicitly encode the robot’s intrinsic geometric symmetry, drawing inspiration from parameter-sharing patterns used in cooperative multi-agent RL.
- Connection to multi-agent RL. We make the relationship between geometric priors and parameter sharing precise: treating symmetric limbs/fingers as cooperating “agents” with shared parameters recovers an equivariant policy class.
- Result. Symmetry-aware policies learn faster and transfer better than baselines across simulated and real-robot tasks (videos above: Trifinger manipulation and Ant-on-Ball balancing), and earned a Best Paper nomination in the Cognitive Robotics Track at ICRA 2024.